Projekte / Diplomarbeiten der HEL
SchülerInnen setzen im Zuge der Diplomarbeit Projekte in verschiedensten Bereichen um. Dabei arbeiten sie oft in Kooperation mit renommierten Unternehmen aus der Industrie und können erste Erfahrungen für das Berufsleben sammeln. Unsere SchülerInnen stellen in Videos ihre Diplomprojekte vor.
Weitere Diplomarbeiten:
Solarautonomes Golfcart
Weltweit erstes solarautonomes Golfcart mit Unterstützung des TGM
Wie nah am Puls der Wirtschaft Diplomprojekte sein können, zeigt die Zusammenarbeit zwischen einem italienischen Industrieunternehmen, einem Designbüro aus Wien, einer Schlosserei und drei Diplomprojektteams an der Abteilung für Elektronik und Technische Informatik: In einer dreijährigen Projektzusammenarbeit wurde ein Golfcart konstruiert, das nach zehn Stunden Sonneneinstrahlung eine Stunde fahren kann, also nur solar und vollkommen autonmon von äußeren Energiequellen betrieben werden kann. Damit wurde technisches Neuland betreten: Es gab keine Modelle, an denen sich das TGM-Team orientieren konnte.
Das Team meisterte eine Reihe von Herausforderungen innovativ:
die Integration einer Vielzahl von Einzelsystemen in ein Gesamtkonzept nach dem Vorbild des modernen Automobilbaus
die richtige Auswahl an Komponenten, um die gewünschte Autonomie zu erreichen, etwa durch den Einbau eines fast 2 m2 großen Solarpanels
Vermeidung von Getriebeverlusten durch elektrisch direkt angetriebene Räder
energieeffiziente Balancertechnologie zum Laden der Bleiakkus
Maßnahmen zur Energierückgewinnung und elektronischer Fahrwerksunterstützung

Mehrere Maturagruppen waren über einige Schuljahre hinweg an diesem Projekt beteiligt:
⇒ 2015/16: Elektronisches Differenzial und Fahrwerksregelung wurden entwickelt
⇒ 2016/17: Entwicklung des BUS-Systems, der Laderegler und Akkubalancer
⇒ 2017/18: Zentrales Energiemanagement, das während des Betriebes auf einem Tablet alle Energie- und Fahrdaten auf einen Blick darstellt, Wegfahrsperre
⇒ 2019/2020: Solarladeeinheit und Energiemanagement wurde verbessert wodurch sich die Reichweite des Carts ca. auf zwei Stunden verdoppelte
Zum gemeinsamen Projekterfolg beigetragen haben:
⇒ Das Industriedesignbüro, der Batterienhersteller enppex GmbH, die Schlosserei Koiner sowie das italienische Industrieunternehmen Marcegaglia
⇒ Die Finanzierung, Organisation und Integration des Projektes erfolgte durch den Betreuer Prof. Haiden
⇒ Zur Demonstration des Echtbetriebes wurden die Mitglieder von zwei Maturajahrgängen für drei Tage zum Feldtest nach Italien eingeladen
Technische Eckdaten:
Ladekapazität: 200 kg (2 Personen)
Fahrzeit: 12 Stunden Sonne ergibt 2 Stunden fahren oder 1 Nacht an der Steckdose 4 Stunden Fahrzeit
Reichweite: ca. 80 km nach vollständiger Ladung
Höchstgeschwindigkeit: 43 km/h (elektronisch auf 25 km/h beschränkt)
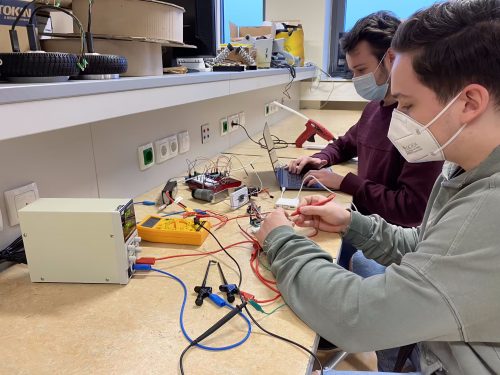
Cardanic Self Stabilizing Unit
Selbst stabilisierende Einheit
Das Endprodukt soll eine mechanische, selbst stabilisierende Einheit (vgl Steadycam, Gimble) sein, die in der Bild- und Videoaufnahme helfen kann, das Aufnahmegerät zu stabilisieren. Die Stabilisierung erfolgt durch Servomotoren und einer Real-Time Positionsregelung.
Weiters soll unser Projekt als Basis für Weiterentwicklungen in diesem Bereich dienen. Auf dem Bild sieht man die Validierung und Programmierung einer neu entwickelten Platine.
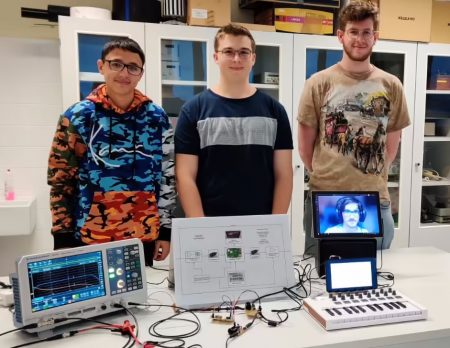
Digitaler Synthesizer
Beim Diplomprojekt „Digitaler Synthesizer II“ der Schüler Arbin Hajredini, Dominik Frühwirth, Raphael Busanszky und Nico Srieder aus der 5AHEL der höheren TGM-Abteilung für Elektronik und Technische Informatik wird ein digitaler Musik-Synthesizer mit analogem Eingangs- und Ausgangsverstärker implementiert. Die digitale Klangsynthese basiert auf Frequenz- und Ringmodulation. Der Synthesizer wird über ein MIDI-Controller-Keyboard angesteuert und kann auch externe Audiosignale verarbeiten. Die digitale Signalverarbeitung erfolgt auf einem Raspberry-Pi-Mikrocontroller mit der Audiosignalverarbeitungssoftware Pure Data.
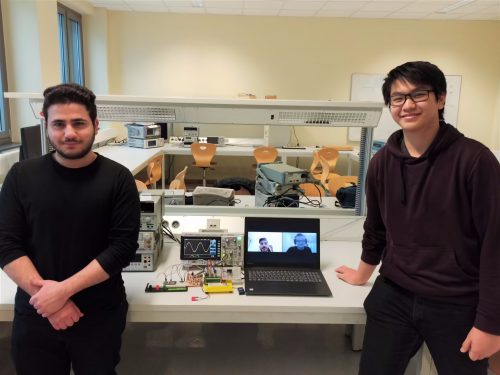
Mobiles RLC-Messgerät
Die Schüler der 5AHEL Eman Dedovic, Müslim Dikmen, Miaoxin Jiao und Alireza Solgi entwickeln und bauen ein mobiles und kompaktes RLC-Messgerät, welches die elektrischen Größen Widerstand, Kapazität und Induktivität der entsprechenden Bauteile schnell und ohne stationäre Stromversorgung messen kann. Die Werte der Bauteile werden mit der Genauigkeit eines Betriebsmessgerätes ermittelt
Widerstände, Kondensatoren und Spulen unterschiedlicher Wertebereiche werden mittels einer Messschaltung erfasst und die jeweiligen elektrischen Größen werden als entsprechender Zahlenwert ausgegeben.
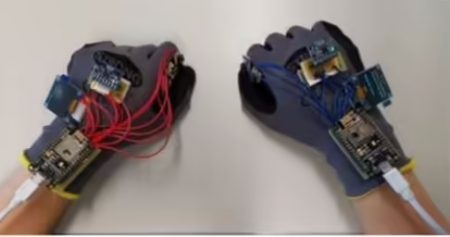
Gestengesteuerte Flugdrohne
In der vorliegenden Arbeit wurde für eine handelsübliche Flugdrohne eine intuitive Gestensteuerung entwickelt. Die Drohne soll im Freizeitbereich eingesetzt werden.

Um die Gestensteuerung zu realisieren, wurden Bewegungssensoren eingesetzt. Diese Sensorik wird am Handschuh des Betreibers befestigt. Zwei Microcontroller übernehmen die Bewegungsdaten der beiden Bewegungssensoren und leiten diese über W-LAN an das zentrale Betriebssystem Robot Operating System weiter. Das Robot Operating System (ROS) ist ein Software-Framework für Roboter und Drohnen.
Advanced e-Longboard
Funkgesteuertes Longboard
Mit dem elektrischen Longboard sollen kurze bis mittlere Distanzen zurückgelegt werden. Es werden effiziente bürstenlose Motoren verwendet, da sie effizienter sind und geringe Materialabnützungen aufweisen. Um die Motoren anzutreiben benötigt man Steuerungshardware. Dazu wird ein Open-Source Projekt integriert. Der Controller ist leistungsfähig, programmierbar, und effizient im Betrieb programmierbar. Die Kommunikation zwischen dem Longboard und Fernbedienung erfolgt durch NRF24 Modul im Frequenzband von 2.4GHz. Ein integriertes OLED Display zeigt alle wichtigen Daten, wie z.B. Geschwindigkeit und Akkustatus an.
